

 |
















SLJ-80-R-FT
Escott
製品説明
基本情報
| Condition | 新しい | 応用 | 箱、カートン、ブロックなどの通常のブロックの取り扱いに使用します | |
| タイプ | クランプ治具付きマニピュレーター | 容量 | 80kg-500kg、カスタマイズされた | |
| 上下ストローク | 0-2000mm、カスタマイズされた | 作業半径 | 2500-3000mm、カスタマイズされた | |
| 最大高さ | 3500mm、カスタマイズされた | 基本デザイン | クランプ、持ち上げ、回転 | |
| インストールフォーム | カスタマイズされた | 仕様 | カスタマイズされた | |
| 輸送パッケージ | 木箱 | 起源 | 中国 | |
| 商標 | エスコット、またはカスタマイズされた | 生産能力 | 100個/月 |
概要
私たちのチームはマニピュレーターの支援において 10 年以上の経験があり、生産ラインでの重量物の取り扱いの問題の解決に常に取り組んできました。
産業用マニピュレーターは、力学と人間工学に基づいて設計された一連のハンドリング支援装置で、最大 500 kg のさまざまな製品を持ち上げることができます。
一般的なアプリケーション シナリオには主に次のものが含まれます。
1. 対象物が重すぎる、または大きすぎて人力で運ぶことができない。
2. 手動では送信角度や対象物の位置を把握するのが難しい
3. 手動による対象物の移送は大きな損失を引き起こしやすい
4. 目標物体は容易に多大な人的損失を引き起こす可能性があります。
このような状況を踏まえ、当社ではハンドリング補助具としてマニピュレータを導入し、問題を完全に解決しました。作業対象は、箱のパレタイジング、マテリアルダンプ、リールの積み降ろし、包装袋のハンドリング、金属ワークのハンドリング、シリコンロッドの移植、自動車部品や組立など、あらゆる産業の生産プロセスで活躍しています。
さまざまな種類の荷重の設計スケッチ:
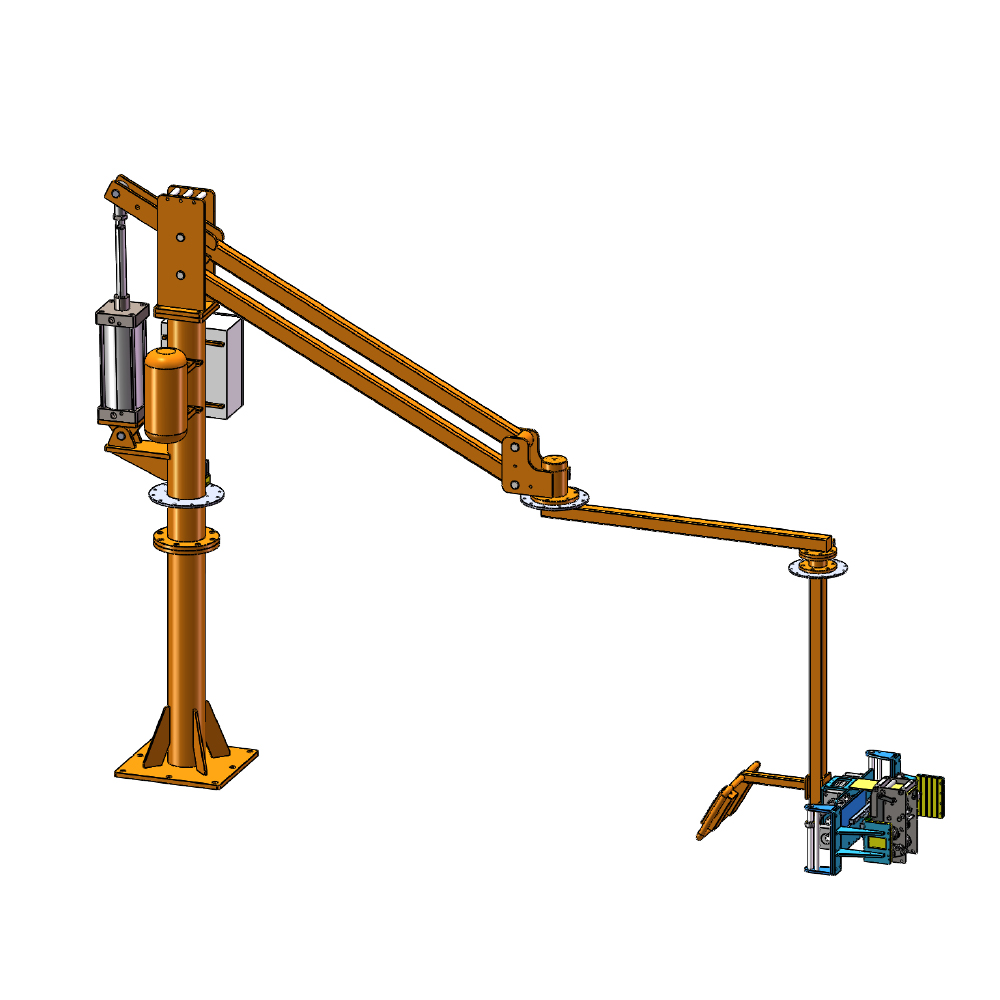 | 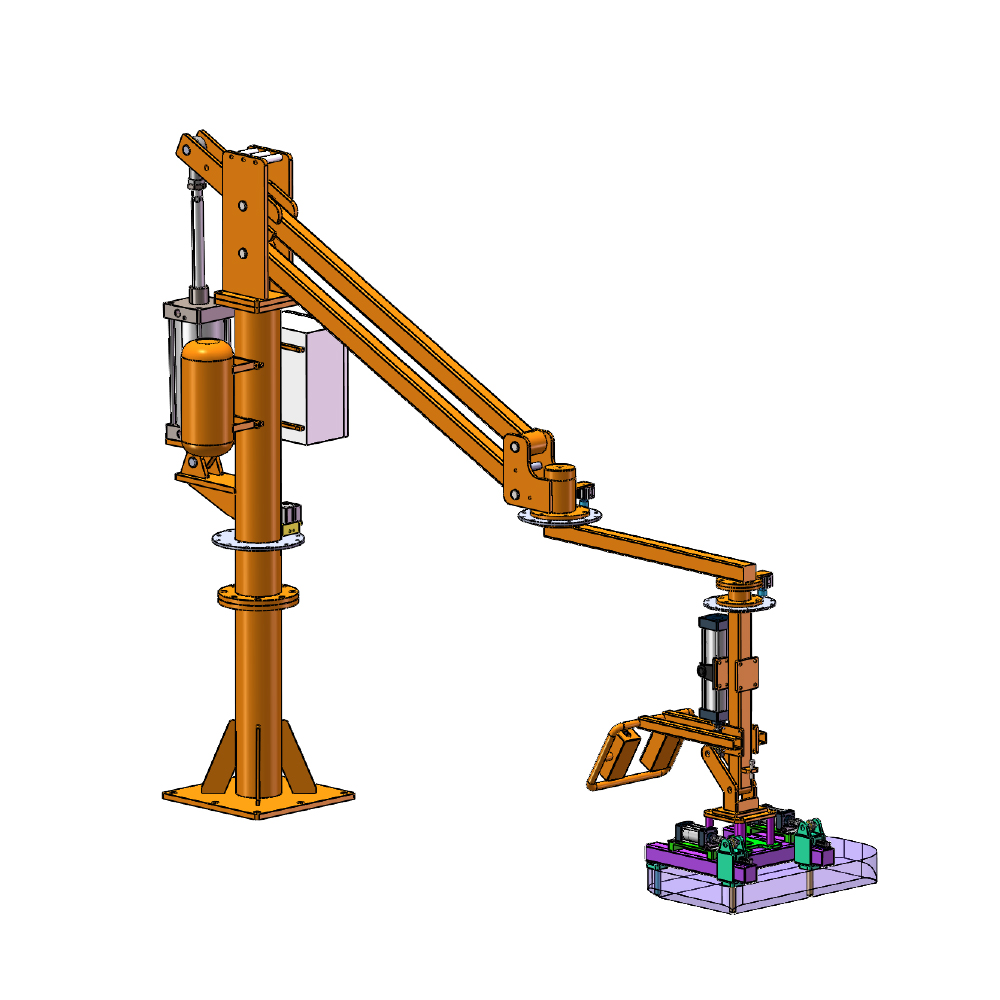 |
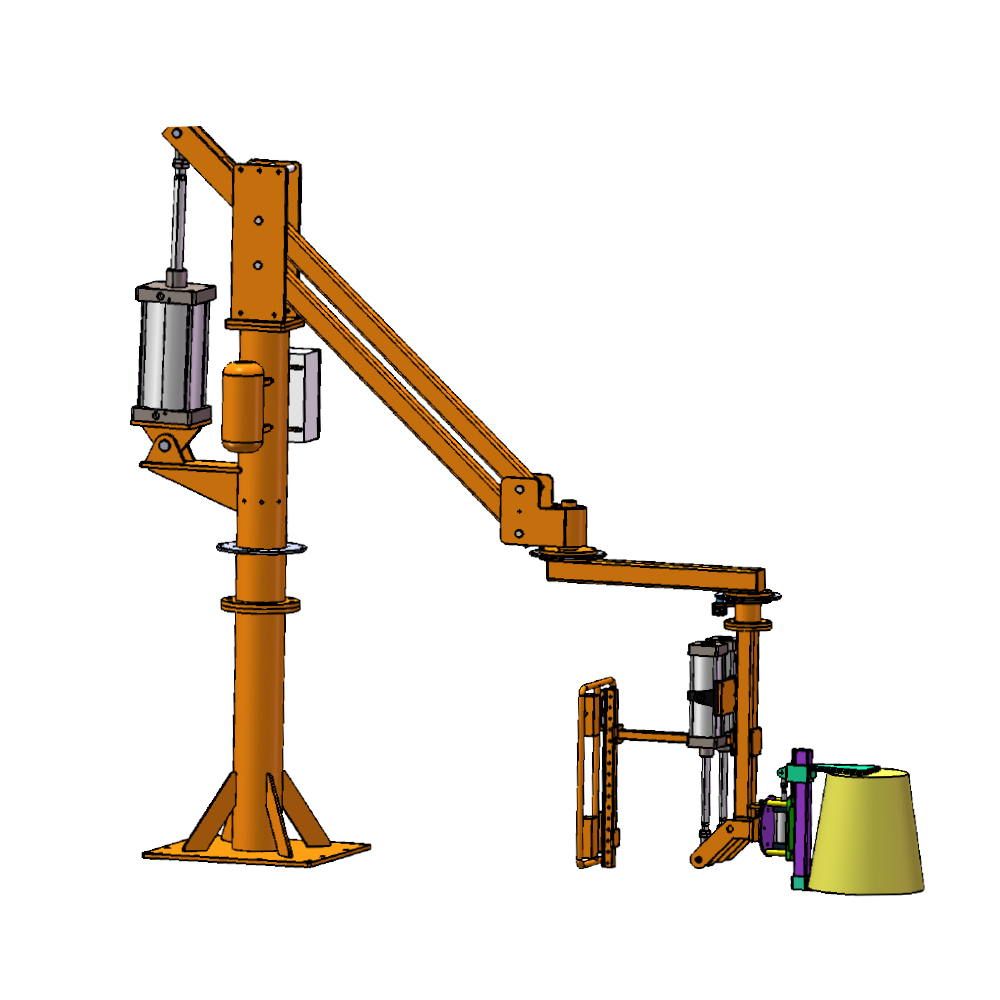 | 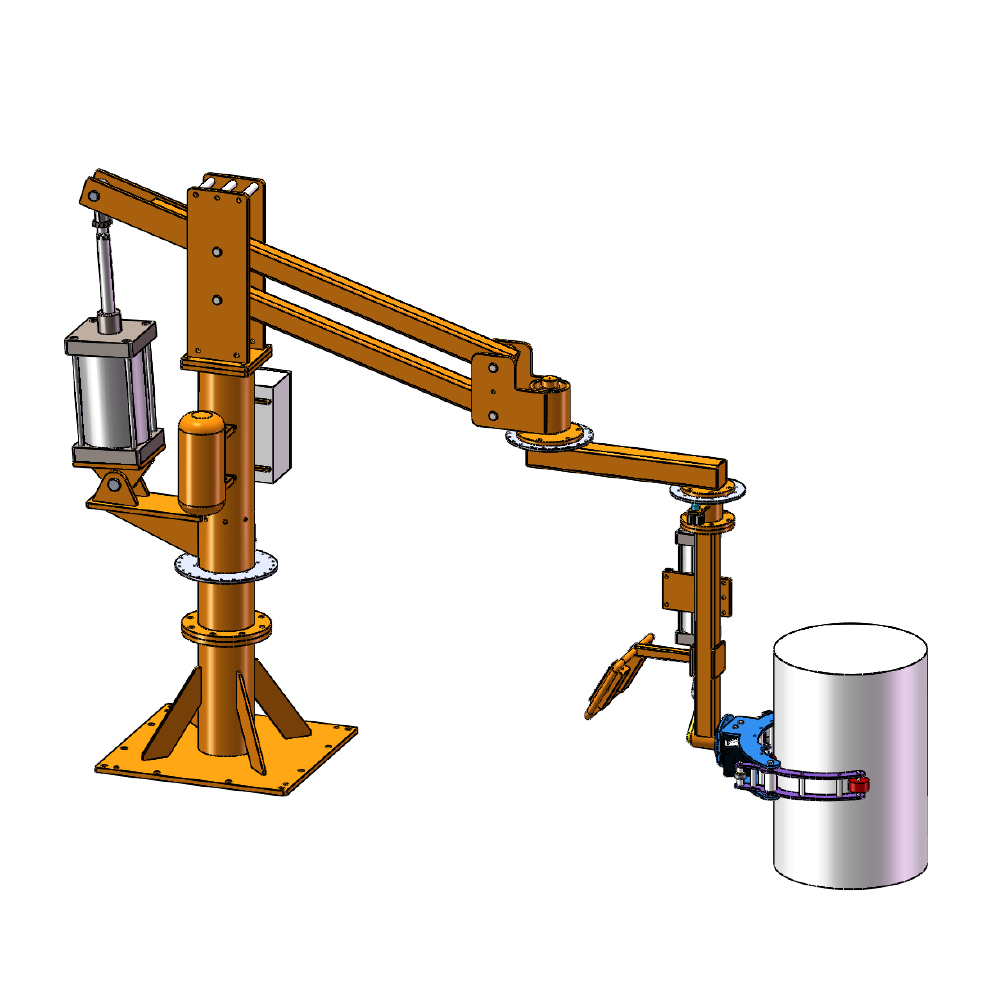 |
作業オブジェクトの説明:
この種の設計では、クランプ爪を使用します。物体の形状、重量、表面などに基づいて形状と機構が設計され、クランプ方法は異なりますが、作業方法は荷物の外側からクランプし、移動して移動するのと同様です。生産ラインで。形状としては円柱、円錐、角形などが主で、スクリーン、ボード、ハードブロック、ロールなどのタイプがあります。負荷の要件は次のようになります。
1. 規則的な形状
2. 爪が外側から固定できる適切なサイズ
2. 体重は主に50〜300kg
参考用のその他のフィクスチャ ツール タイプ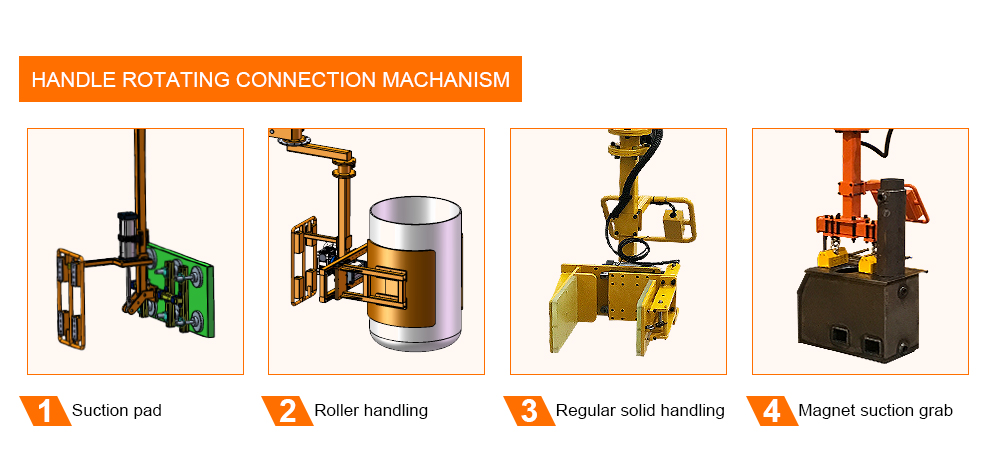
設置方法
それぞれの設置には独自の利点があり、プロジェクトのニーズとお客様のワークショップの作業条件に完全に基づいています。
1.固定列: ほとんどの選択肢
2.可動コラム
3.固定オーバーヘッド(壁設置)
4. オーバーヘッド走行(スライディングトロリーによる)
製品操作ガイド
1.基本設計:装置は360度自由に持ち上げて回転することができ、ワークの把握、取り扱い、持ち上げ、ドッキング中に3次元空間荷重シフト動作を完了でき、材料抽出の要件を満たすことができます。
2.操作プラットフォーム:荷重制御システムを装備し、制御ボタンを通じて材料の把握、移送、抽出を実現できます。メカニカルグリッパーは、ワークピースをスムーズに掴み、移動し、排出できることを保証する必要があります。
3.安全保護:安全誤操作保護装置(ワークが所定の位置にない、ワークをアンロードできない)、サポート安全制御システム(誤操作によりマニピュレータが急激に上昇および下降しない)、ブレーキ装置が装備されています。
アプリケーションシナリオ














